TP Modul 2



3. Dasar Teori
[Daftar]
1. Arduino UNO
3. Motor DC
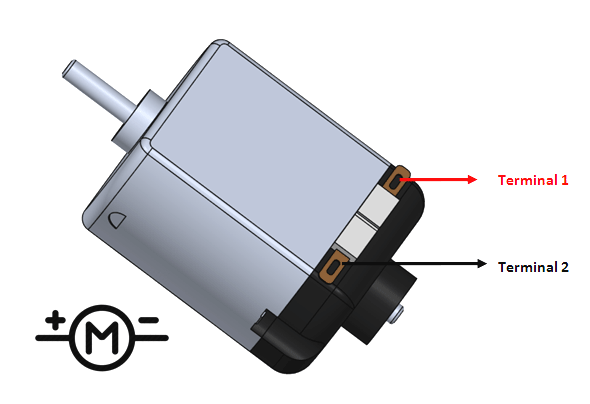
Digunakan sebagai motor yang menggerakkan solar cell untuk mencari cahaya matahari. Motor DC normal hanya memiliki dua terminal. Karena terminal ini dihubungkan bersama hanya melalui kumparan, mereka tidak memiliki polaritas. Membalikkan koneksi hanya akan membalikkan arah motor.
Untuk membuatnya berputar hubungkan saja sisi positif (+) baterai ke satu terminal dan tanda Negatif (-) baterai ke ujung lainnya dan motor akan berputar. Jika ingin membalik kecepatan motor cukup tukar terminal dan arahnya juga akan dibalik. Untuk mengontrol kecepatan motor variasikan tegangan yang disuplai ke Motor, cara termudah untuk melakukannya adalah menggunakan Potensiometer.
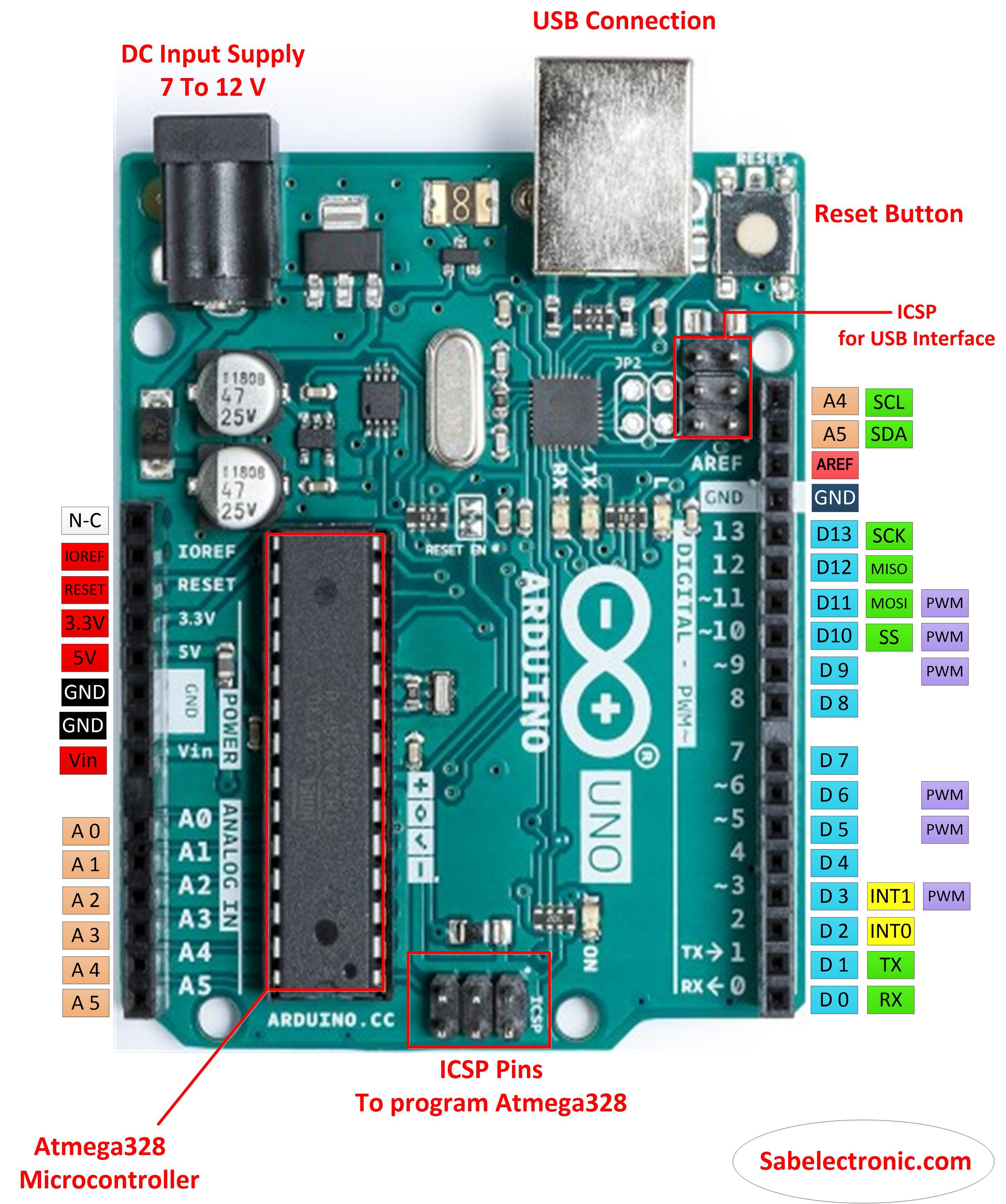
Arduino Uno adalah papan mikrokontroler berbasis ATmega328 yang memiliki 14 pin digital input/output (di mana 6 pin dapat digunakan sebagai output PWM), 6 input analog, clock speed 16 MHz, koneksi USB, jack listrik, header ICSP, dan tombol reset. Board ini menggunakan daya yang terhubung ke komputer dengan kabel USB atau daya eksternal denga adaptor AC-DC atau baterai.
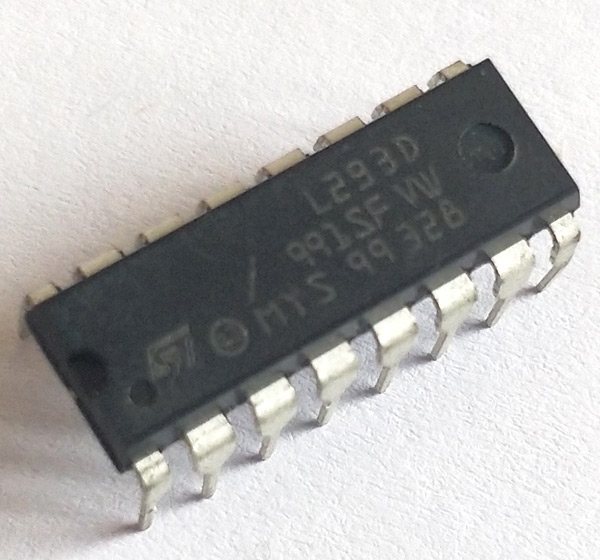
2. IC L293D
| Microcontroller | ATmega328P |
| Operating Voltage | 5V |
| Input Voltage (recommended) | 7 – 12 V |
| Input Voltage (limit) | 6 – 20 V |
| Digital I/O Pins | 14 (of which 6 provide PWM output) |
| PWM Digital I/O Pins | 6 |
| Analog Input Pins | 6 |
| DC Current per I/O Pin | 20mA |
| DC Current for 3.3V Pin | 50mA |
| Flash Memory | 32 KB of which 0.5 KB used by bootloader |
| SRAM | 2KB |
| EEPROM | 1KB |
| Clock Speed | 16MHz |
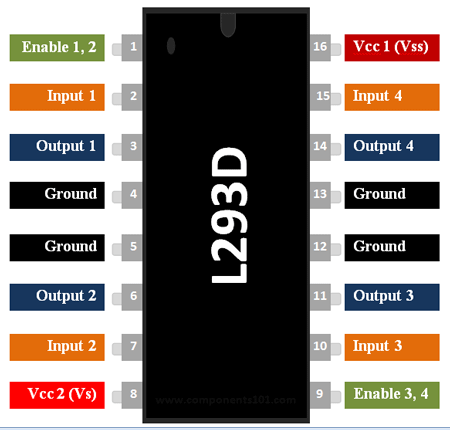
L293D adalah IC Driver Motor 16-Pin yang populer. Seperti namanya, ini terutama digunakan untuk menggerakkan motor. Sebuah IC L293D tunggal mampu menjalankan dua motor DC secara bersamaan; juga arah kedua motor ini dapat dikontrol secara mandiri. Jadi jika Anda memiliki motor yang memiliki tegangan operasi kurang dari 36V dan arus operasi kurang dari 600mA, yang harus dikendalikan oleh sirkuit digital seperti Op-Amp, timer 555, gerbang digital atau bahkan Mikrokontroler seperti Arduino, PIC, ARM dll. IC akan menjadi pilihan yang tepat untuk Anda.
 Fungsi Pin:
Fungsi Pin:
1. Pin EN (Enable, EN1,2, EN3,4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input 1-4) adalah pin input sinyal kendali motor DC.
3. Pin Out (Output 1-4) adalah jalur output masing-masing driver yang dihubungkan ke motor DC.
4. Pin VCC (VS, VSS) adalah jalur input tegangan sumber driver motor DC, dimana VSS adalah jalur input sumber tegangan rangkaian kontrol dirver dan VS adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
5. Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
1. Pin EN (Enable, EN1,2, EN3,4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
2. Pin In (Input 1-4) adalah pin input sinyal kendali motor DC.
3. Pin Out (Output 1-4) adalah jalur output masing-masing driver yang dihubungkan ke motor DC.
4. Pin VCC (VS, VSS) adalah jalur input tegangan sumber driver motor DC, dimana VSS adalah jalur input sumber tegangan rangkaian kontrol dirver dan VS adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
5. Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
3. Motor DC
Digunakan sebagai motor yang menggerakkan solar cell untuk mencari cahaya matahari. Motor DC normal hanya memiliki dua terminal. Karena terminal ini dihubungkan bersama hanya melalui kumparan, mereka tidak memiliki polaritas. Membalikkan koneksi hanya akan membalikkan arah motor.
Untuk membuatnya berputar hubungkan saja sisi positif (+) baterai ke satu terminal dan tanda Negatif (-) baterai ke ujung lainnya dan motor akan berputar. Jika ingin membalik kecepatan motor cukup tukar terminal dan arahnya juga akan dibalik. Untuk mengontrol kecepatan motor variasikan tegangan yang disuplai ke Motor, cara termudah untuk melakukannya adalah menggunakan Potensiometer.
4. Percobaan
[Daftar]
Prinsip Kerja
Pin 9 dan 10 arduino dihubungkan ke pin IN1 dan IN2 IC L293D yang berfugsi sebagai input PWM ke IC L293D. Pin VSS pada IC L293D dihubungkan ke sumber untuk mengaktifkan fungsi IC. Pin EN1 adalah pin Enable yang digunakan untuk mengaktifkan input IN1 dan IN2. Pin VS dihubungkan ke sumber baterai yang digunakan sebagai sumber untuk motor DC. Pin 3 dan 6 IC L293D dihubungkan ke masing-masing pin motor DC.
Pada program pertama-tama dideklarasikan pin pada arduino yang dihubungkan ke pin IN1 dan IN2 IC L293D. Pada void setup() dilakukan deklarasi pin in1 sebagai OUTPUT dan pin in2 sebagai OUTPUT. Pada void loop() dilakukan perulangan dengan nilai awal i=0 sampai i=255 dan nilai i diincrementkan. Perulangan dibuat dari 0 sampai 255 karena PWM memiliki alokasi data 8bit sehingga memiliki rentang 0-255. Untuk setiap perulangan nilai PWM ditambah 1 dari 0 sampai 255. Untuk output analogWrite(in1, i); pin in1 digunakan sebagai OUTPUT PWM dengan nilai PWM i (duty cycle PWM berubah-ubah untuk meningkatkan kecepatan motor). Untuk output analogWrite(in2, 0); pin in2 digunakan sebagai OUTPUT PWM dengan nilai PWM 0 (duty cycle PWM tetap pada 0%). Pin IN1 akan mengontrol pin OUT1 dan pin IN2 akan mengontrol pin OUT2. Karena pin IN1 yang mendapatkan input PWM maka output yg aktif hanya OUT1 sehingga motor berputar ke kanan.
Rangkaian Simulasi
 Listing Program
Listing Program
#define in1 10
#define in2 9
void setup()
{
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
}
void loop()
{
for(int i=0; i<=255; i++)
{
analogWrite(in1, i);
analogWrite(in2, 0);
delay(25);
}
}
Prinsip Kerja
Pin 9 dan 10 arduino dihubungkan ke pin IN1 dan IN2 IC L293D yang berfugsi sebagai input PWM ke IC L293D. Pin VSS pada IC L293D dihubungkan ke sumber untuk mengaktifkan fungsi IC. Pin EN1 adalah pin Enable yang digunakan untuk mengaktifkan input IN1 dan IN2. Pin VS dihubungkan ke sumber baterai yang digunakan sebagai sumber untuk motor DC. Pin 3 dan 6 IC L293D dihubungkan ke masing-masing pin motor DC.
Pada program pertama-tama dideklarasikan pin pada arduino yang dihubungkan ke pin IN1 dan IN2 IC L293D. Pada void setup() dilakukan deklarasi pin in1 sebagai OUTPUT dan pin in2 sebagai OUTPUT. Pada void loop() dilakukan perulangan dengan nilai awal i=0 sampai i=255 dan nilai i diincrementkan. Perulangan dibuat dari 0 sampai 255 karena PWM memiliki alokasi data 8bit sehingga memiliki rentang 0-255. Untuk setiap perulangan nilai PWM ditambah 1 dari 0 sampai 255. Untuk output analogWrite(in1, i); pin in1 digunakan sebagai OUTPUT PWM dengan nilai PWM i (duty cycle PWM berubah-ubah untuk meningkatkan kecepatan motor). Untuk output analogWrite(in2, 0); pin in2 digunakan sebagai OUTPUT PWM dengan nilai PWM 0 (duty cycle PWM tetap pada 0%). Pin IN1 akan mengontrol pin OUT1 dan pin IN2 akan mengontrol pin OUT2. Karena pin IN1 yang mendapatkan input PWM maka output yg aktif hanya OUT1 sehingga motor berputar ke kanan.
5. Video
[Daftar]